强化学习中的Terminated 和 Truncated
深度强化学习的流程可以抽象为以下步骤的重复:
- 智能体与环境交互产生并存储经验
- 智能体从经验中进行学习
本文主要探讨在收集经验过程中,环境自然结束(Terminated,包括目标成功,失败等)和人为截断(Truncated,主要为达到一定步数结束)对经验收集和训练产生的影响,以及如何对其进行处理。并对其进行了部分实验来比较性能。
Q-Learning 简介
在Q-Learning系列算法中,智能体要学习估计每个状态\(s\)下每个动作的最优Q值\(Q^{*}(s,a)\)。其贝尔曼方程如下: \[ Q^*(s_t,a_t)=r_t+\gamma \cdot \max_{a'\in A(s_{t+1})}Q^*(s_{t+1},a_{t+1}) \] 而当\(s_{t+1}\)为一局的结束状态,即\(done(s_{t+1})=True\)时, \[ Q^*(s_t,a_t)=r_t \]
写在一起为: \[ Q^*(s_t,a_t)=\left\{ \begin{array}{**lr**} r_t+\gamma \cdot \max_{a'\in A(s_{t+1})}Q^*(s_{t+1},a_{t+1}) & if\ done(s_{t+1})=False\\ r_t & if\ done(s_{t+1})=True \end{array} \right. \] 在程序实现过程中,通常写为:
1 | q_target = reward + self._gamma * max_next_q_value * (1 - done) |
截断问题
Q-Learning的关键在于对于值函数的准确估计,如果环境在推演过程中被人为截断,如果被当作环境终止来处理,则对\(Q^*\)的估计就少了一项\(\gamma \cdot \max_{a'\in A(s_{t+1})}Q^*(s_{t+1},a_{t+1})\)。这在一定程度上会使\(Q^*\)函数在学习的过程中不稳定,或难以收敛。另外,终止状态往往和奖励\(r_t\)有关,若不对人为截断的情况进行另外处理,则有可能会给智能体一个有偏差的奖励,从而使智能体的训练过程出现问题。
因此,在经验记录和reward设计时,除了要考虑环境自然结束(Terminated)外,也要考虑提前终止等人为截断(truncated)的情况。强化学习环境库gym从0.26版本开始,每个step都会返回这两个信息,从而方便训练。
考虑截断的情况下,\(Q^*\)的贝尔曼方程的程序实现就变为了:
1 | q_target = reward + self._gamma * max_next_q_value * (1 - done + truncated) |
实验对比
本文在gym的CartPole-v1环境上进行测试,最大回合数设为200,训练步数为500,隐层网络为2层64节点的全连接网络,每步训练次数为8,buffer
size为100000,batch size为64,最小训练经验数为500,初始\(\epsilon=0.9\),终止\(\epsilon=0.01\),\(\epsilon\) decay
步数为200步,奖励函数为:
1 | def cart_pole_v1(params): |
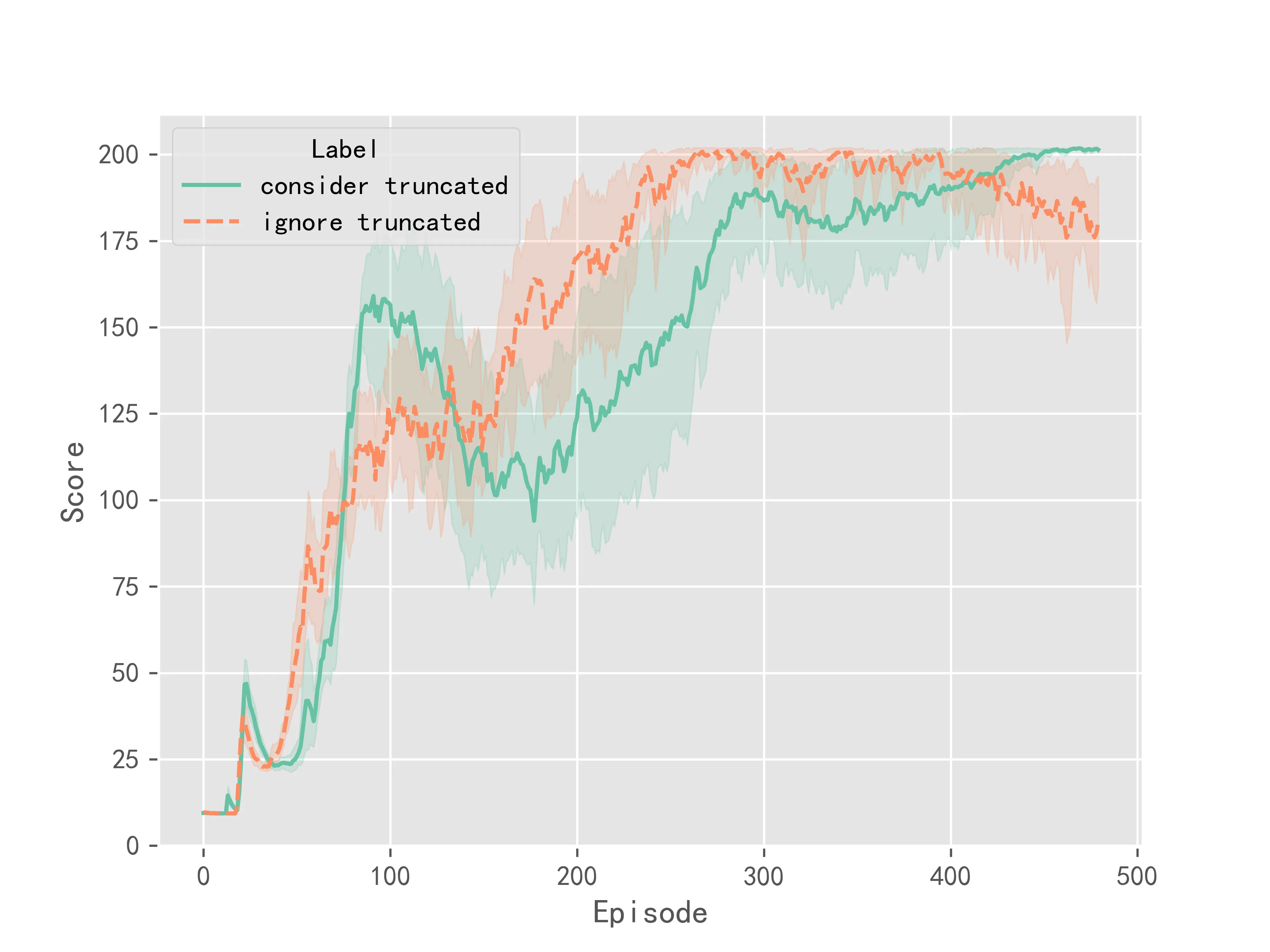
在DQN算法中实验结果如图1所示:
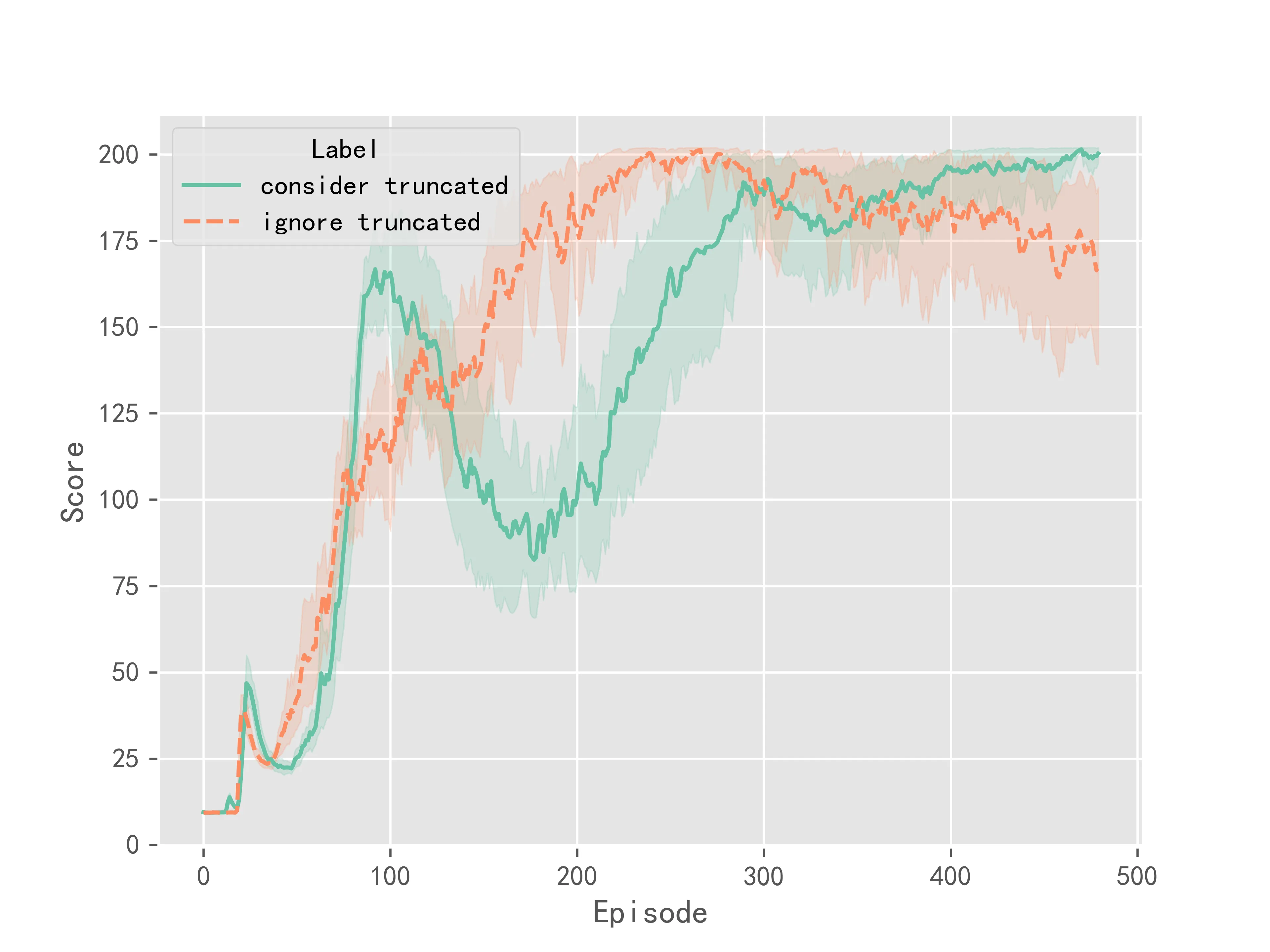
在Double DQN算法中实验结果如图2所示:
在Dueling DQN算法中实验结果如图3所示:
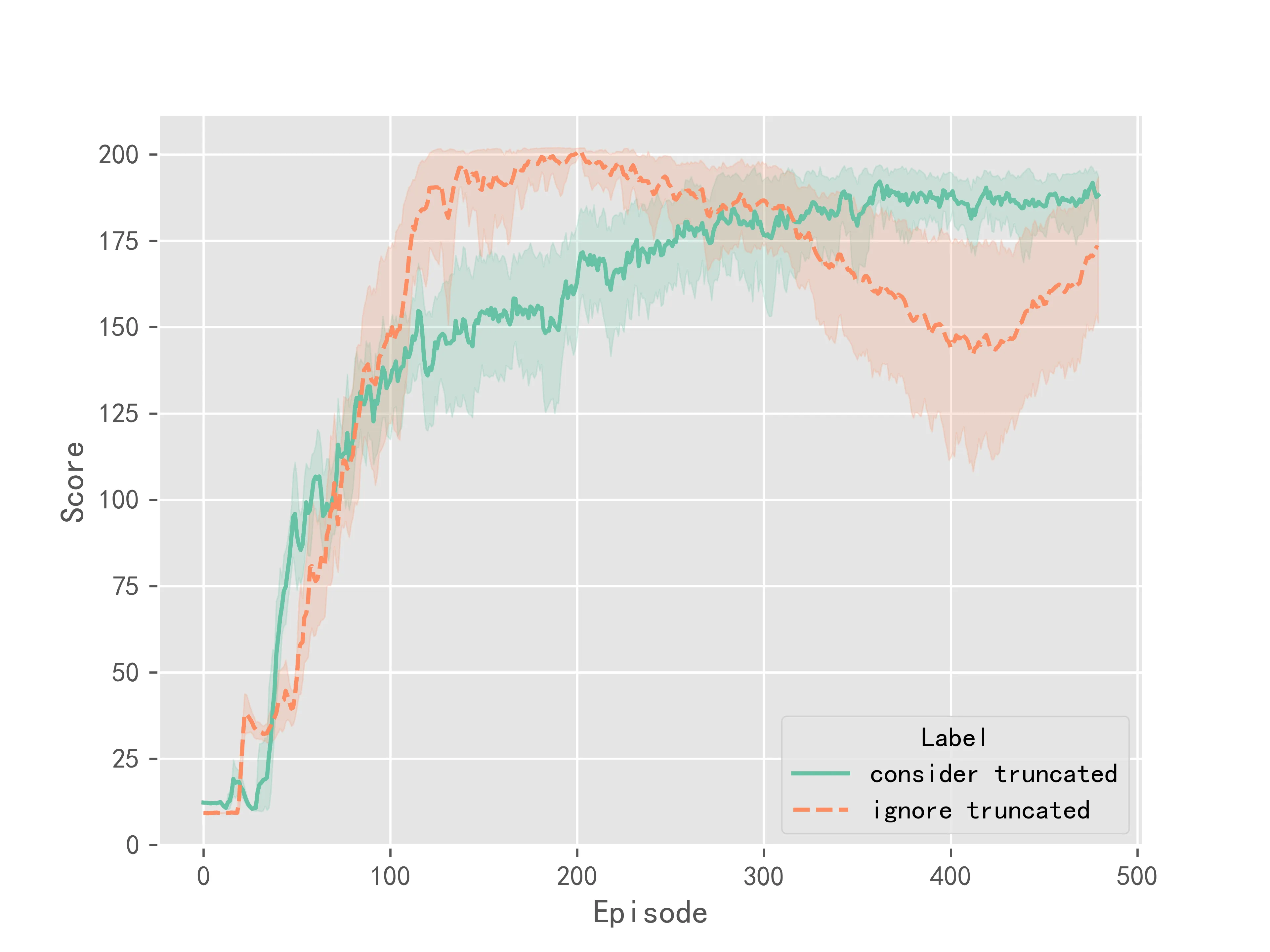
在D3QN算法中实验结果如图4所示:
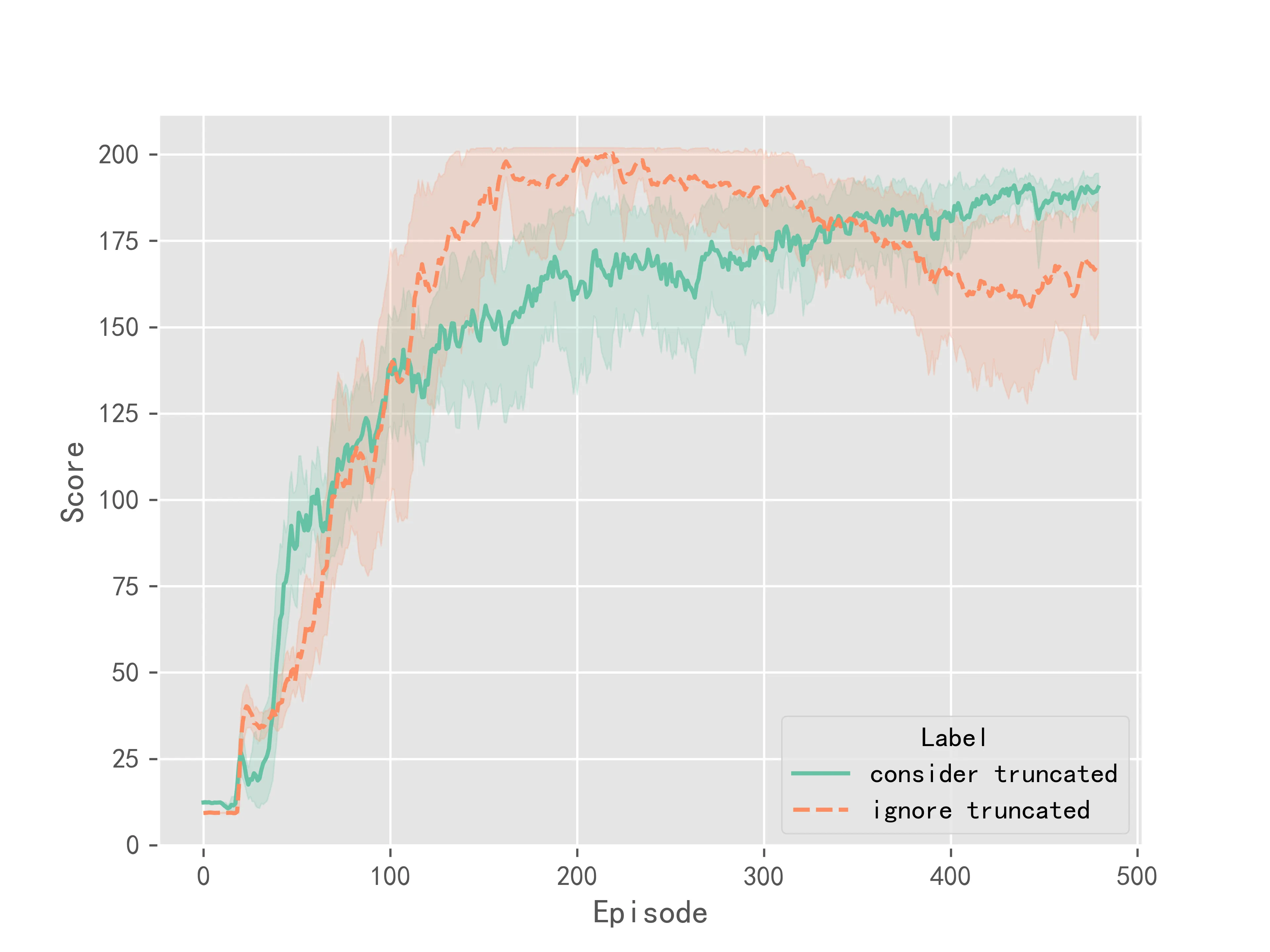
上述实验结果表明,相比于不考虑截断,考虑截断情况之后,算法的训练更加稳定,最终收敛的结果方差较小。但考虑截断并不能明显提升Q-Learning系列算法的收敛速度或是表现性能。它更多的是提升了训练时的稳定性。